
Samozřejmě, že nejde jen o ten jejich tanec. To je jen začátek. Jde o tanec, který by mohlo vyvolat jejich zavedení do běžné praxe a věřte, že se naskýtá spousta aplikací, na které by se mikroskopické roboty, schopné samostatného manévrování bez jakéhokoliv zjevného řízení, pracující v organizovaných „týmech“ mohly hodit.

„Je to úžasné dokázat sestrojit a ovládat tak drobounké věci,“ říká Bruce Donald, profesor počítačové vědy a biochemie na Duke University. „Každý mikrorobot má tvar podobný špachtli, ale v rozměrech pouhých mikrometrů, tedy miliontin metru. Jsou téměř stokrát menší než jakýkoliv předchozí robotický návrh svého druhu na světě a váží ještě méně,“ dodává Donald.
Formálně známí jako mikroelektromechanické systémové (MEMS) mikroroboty jsou zařízením vpravdě liliputánským. Zatím se pohybují v interiéru laboratoře na svém malém jevišti.
Na videozáznamech vyrobených Donaldovým týmem, můžete vidět dva mikroroboty, které převádí piruety v rytmu Straussova valčíku na „tanečním parketu“ velikosti jednoho čtverečního milimetru. Video vám dá představu, jak to může vypadat.
Video s vysokým rozlišením (150MB)
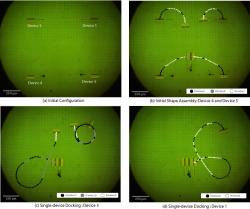
Poslední úspěch výzkumné skupiny spočívá v získání pěti zařízení, které skupinově manévrují ve spolupráci s jedním řídícím systémem. „Naše práce tvoří první implementaci nepřipoutaného multi-mikrorobotického systému,“ napsal Donaldův tým ve zprávě, která bude prezentována v červnu 2008 během Hilton Head Workshop on Solid State Sensors, Actuators and Microsystems v Jižní Karolíně. Komplexnější detaily o tom, jak vědci získali tyto mikrosestavy budou publikovány později v Journal of Microelectromechanical Systems.
Donald pracoval na různých verzích MEMS mikrorobotů od roku 1992, zpočátku na Cornellu a potom na Stanfordu a Dartmouthu, před tím než přišel na Duke. „První verzí bylo seskupení napodobující řasinková ramena mikroorganismů, které mohly pohybovat objekty, jako jsou mikročipy na jejich vrcholu, stejným způsobem, jakým zpěvák v rockové aréně surfuje davem,“ řekl. „Dokázali jsme umístit 15 tisíc takových řasinek na čtvereční palec.
Zpráva z února 2006 vydaná v Journal of Microelectromechanical Systems, kterou napsali Donald, Paprotny, Levey a další vědci, podrobně popsala základy vzoru: zařízení asi 60 mikronů široké, 250 mikronů dlouhé a 10 mikronů vysoké poháněné a ovládané pomocí elektrifikovaného povrchu. Posun po takovém povrchu, pomocí pohybu podobnému píďalce, umožňuje mikrorobotům postupovat v „krůčcích“ o „délce“ pouhých 10 až 20 miliardtin metru, ale ti jsou schopni je opakovat 20 tisíckrát za vteřinu.
Mikroroboty mohou být tak malé, protože nejsou zatíženy něčím takovým, jako jsou vodící lana připojená k externímu řídícímu systému. Jejich stavba vedená technikou podobnou té při výrobě mikročipů, umožňuje, aby byl každý navržen tak, aby reagoval odlišně na stejný jednoduchý „globální řídící signál“.
„Tento globální řídící systém je blízký způsobům reakce proteinů v buňce na chemické signály,“ řekl Donald, který také používá počítačové algoritmy ke studiu procesů v biochemii a biologii.
Ve svých nových zprávách, tým ukazuje, že pět z mikrorobotů se může společně pohybovat, po předem plánovaných drahách, kdy každý je postaven v trošku odlišné velikosti a ovladatelnosti. Tato choreografie načrtnutá pomocí matematiky umožnila, že se se mikrozařízení nakonec shromáždila do skupiny mikroskopického davu, který by se měl dát nastavit i pro nějakou užitečnější činnost.
Že to celé nebylo vůbec jednoduché, dokladuje doba, kterou se úkolu věnují. Vytvoření mikrorobotu, který může fungovat bez vodiče, zabralo Donaldovi a jeho kolegům čas od roku 1997 do roku 2002, další tři roky vytvoření zařízení umožňující jejich globální řízení a další tři roky jim trvalo nezávislé manévrování, více než jednoho mikrorobotu současně.
„Nejtěžší věcí bylo dosáhnout toho, aby rozličné mikroroboty mohly pracovat nezávisle, i když získávají stejnou energii a využívají stejné řízení,“ řekl Donald.
Donald se svými kolegy plánují možnost aplikace manévrovatelných mikrorobotů pomocí elektrod tenkých miliardtiny metru s cílem využít je ke stimulaci nervových buněk. Tento výzkum financuje Duke Institute for Brain Sciences.
Zdroj: Duke University.
Diskuze:
cestina
nobody,2008-06-16 15:19:00
pod jednim obrazkem je napsano "Roboty jsou zpočátku umístění v rozích obdélníka ..." nemelo by tam nahodou byt "Roboty jsou zpočátku umísněny ..."
i/y
Jirka,2008-06-09 09:14:09
Vono je přece jen malinko rozdíl, jestli hlavní díl práce při přípravě pohoštění odvedli kuchynští roboti, či zda to odvedly kuchyňské roboty... řekl bych...
(taky k tomu mohli roboti využít roboty)
;-))))
?
rejpal,2008-06-09 07:46:29
Nějak nechápu, proč bychom měli bojovat proti rozlišovací schopnosti češtiny. Já jsem rád, že se používají jak roboty, tak roboti.
Parazité
Filip,2008-06-08 01:31:00
Za chvíli nás budou pomocí mikrobotů ovládat, budou řídit činnost našeho mozku...To už předpověděli tvůrci filmu Já, robot. Možná, že to co teď píšu za mě vymýšlejí mikroboti, možná proto je to takový blábol :D
Roboty ?
Dr.Sid,2008-06-06 16:48:15
Dost by mne zajimalo kdo prisel s tim slovem roboty. Pokud vim je to dnes uz ve spisovne cestine, ale kde se to vzalo ? Capek to tak urcite nepouzival.
Roboti a roboty
Jan Šimůnek,2008-06-06 21:20:48
Roboti - původ - Josef Čapek (na bratrovo postěžování, že píše hru o umělých lidech, říká jim "laboři", ale vůbec se mu to nelíbí; odpověděl, "tak jim říkej roboti").
Roboty - odvozené slovo pro mechanické příšerky, které nejsou humanoidní (na rozdíl od těch s měkkým i).
ano ano ..
Dr.Sid,2008-06-07 00:37:19
Ale kdo to odvodil ? Koho to napadlo ? Chci mu poslat dopisni bombu. Nebo mozna i balicek.
Osobne tenhle tah cestny vsemozne bojkotuji, prosim pridejte se ! Roboti vam budou vdecni, i ti kuchynsti !
hm?
CC,2008-06-07 02:03:22
úplně legitimní neživotný tvar; inu, bohatství češtiny je progresivní až agresivní, bez čehož by jí ostatně ani nebylo. Já měl kupříkladu vždy za to, že roboty->roboti je už v originále R.U.R. jakýs záměrný děj gradující prvek, ovšem když sem si to teď na popud váš znava přečet, zjistil jsem, že jsem si to asi těch dvacet let akorát špatně pamatoval...
Diskuze je otevřená pouze 7dní od zvěřejnění příspěvku nebo na povolení redakce


