
Při prvních kosmických vycházkách (EVA - extravehicular activity) kosmonauti zjistili, že pro úspěšné splnění úkolu je nutné mít se stále čeho držet, kam si zavěsit nářadí, kam připnout sebe. Poučeni těmito zkušenostmi, poseli konstruktéři kosmické lodě a stanice velkou spoustou madel, kterých se může chytit ruka kosmonauta nebo k nim připnout karabina. Tuto infrastrukturu se rozhodli využít japonští inženýři pro pohyb originálního nehumanoidního robota.
Nese jméno REX-J, což je zkratka Robot Experiment on ISS/JEM. Pro pořádek, JEM je jiné označení japonského modulu Kibo Mezinárodní kosmické stanice a zkracuje Japanese Experiment Module.
REX-J není autonomní. Spíše než k marsovskému vozítku Curiosity, které se musí samo rozhodovat, je ho možné přirovnat ke kanadskému manipulačnímu rameni Candarm 2. Obě na ISS poslouží jako prodloužená ruka kosmonauta. Narozdíl od jmenovaného ramene Canadarm, připomínajícího kosmický jeřáb, REX-J vychází z chování pavouka, jenž mezi několika body natahuje svou pavučinu, po níž se pohybuje.
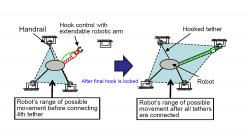
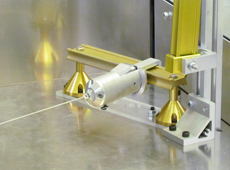
Princip je geniálně jednuduchý. Robot disponuje výsuvným ramenem zakončeným robotickou rukou nebo spíše kleštěmi na ohebném kloubu. Těmi uchopí lano zakončené hákem. Otočením těla určí robot směr, kterým se má rameno vysunout. To posléze začne vyjíždět z těla robota až narazí na některé z madel stanice. K madlu přichytí hák s lanem. Postup opakuje dokud takto nenatáhne všechna čtyři lana. Potom se v prostoru jimi ohraničeným může libovolně pohybovat pomocí koordinovaného navíjení a povolování lan. Dobře je to vidět na obrázku vpravo nebo ještě lépe na demonstračním videu, které vytvořila japonská kosmická agentura JAXA.
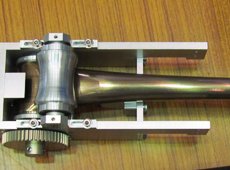
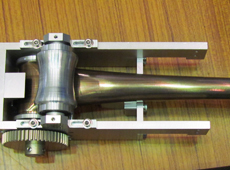
Velmi zajímavou technickou nebo spíše strojařskou lahůdkou je samotné vysouvací rameno. To je tvořeno pružinou ze slitiny s tvarovou pamětí. Více, než co jiného, připomíná svinovací metr. Tato technologie není v kosmickém průmyslu novinkou. Již před čtyřiceti lety používaly japonské satelity paměťové materiály pro rozvinutí svých komunikačních antén na oběžné dráze. Jednalo se však o jednorázový proces. U REX-J je rameno opakovaně odvíjeno a navíjeno motorem uvnitř těla robota, což v kombinaci s extrémními změnami teplot v kosmu klade na materiál ramene mnohem větší nároky.
Celý koncept REX-J je navržen pro provoz v prostředí nulové gravitace. V podmínkách zemské tíže by musel být systém lan výrazně komplikovanější, což by znesnadňovalo i jeho ovládání. V kosmu může být robot ovládán buď dálkově pozemním střediskem. To je možnost, která se při testování bude používat. V budoucnu mohou robotem manipulovat i sami kosmonauti. Ti tedy musí nejprve zachytit robotickou rukou hák, poté otáčet tělem robota a vysunovat rameno. Pro vizuální kontrolu slouží jedna kamera na robotické ruce ramene a několik kamer monitorujících robota zvnějšku, kvůli snazšímu zachycení háku.
Nejtěžší na celé operaci je zaháknutí lana za madlo na povrchu stanice. Po ukotvení všech lan už je samotný přesun robota poměrně snadný. Tím, že jsme si de facto určili výřez 2D prostoru, by měl ke změnám pohybu v něm stačit joystick a dobře napsaný ovládací software, jenž zajistí požadovaný směr posouvání robota otáčením motorů bubnů lan.
Pokud chcete změnit rozsah pohybu robota, stačí lana postupně připínat na různé, k tomu určené úchyty stanice, až se dostanete k cílovému místu.
Sami asi vidíte jednu ze slabin robota a sice omezení 2D prostorem. To by měla napravit novější verze, která na konci svého ramene bude mít ještě další robotické rameno, podobné výše zmiňovanému kanadskému manipulátoru. Současná testovací verze má na konci ramene pouze otočný kloub, umožňující pohyb v rozmezí maximálně několika desítek centimetrů.

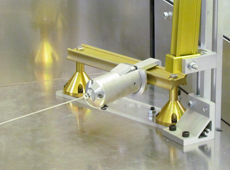
REX-J na ISS vynesla raketa HIIB v nehermetizovaném nákladovém prostoru zásobovací lodi Kounotori 3 v sobotu 21.července 2012. Japonský robotický manipulátor JEMRMS jej přenesl do útrob Multi-mission Consolidated Equipment (MCE) připojeném k modulu Kibo. Od října 2012 probíhaly testy výsuvného ramene. Ty spočívaly v uchopení lana s hákem a v pokusech s pohybováním ramenem sem a tam. Důležité bylo, aby se robot při pohybu sám nekymácel, neboť to by znemožnilo zakotvení lana ke stanici.
Japonská kosmická agentura doufá, že REX-J bude kosmonautům pomáhat při výstupech mimo stanici. Mohl by provádět vnější vizuální kontrolu ISS, zejména monitorovat poškození stanice kosmickým smetím a mikrometeority. Kontrolovat by se s ním daly i různé probíhající experimenty, které by jinak vyžadovaly kosmickou vycházku. V budoucnu by mohl tým těchto robotů sestavovat na oběžné dráze solární elektrárnu nebo jiné složité struktury.
Zdroje informací:
http://www.jaxa.jp
http://www.jaxa.jp
http://robotics.jaxa.jp
http://robotics.jaxa.jp
http://www.thk.com
Zdroje obrázků:
http://robotics.jaxa.jp/rexj/img/20120821_rexj_logo.png
http://www.jaxa.jp/article/interview/2012/vol75/img/img03_e_l.jpg
http://robotics.jaxa.jp/rexj/img/rep/20130306_rexj_rep01.jpg
http://www.jaxa.jp/article/interview/2012/vol75/img/img05.jpg
http://www.jaxa.jp/article/interview/2012/vol75/img/img04.jpg
Psáno pro Kosmonautix a Osel.cz
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Projekt ISS další minimálně 4 roky s podporou všech partnerů, včetně Ruska
Autor: Redakce (29.04.2023)
Superpočítač na ISS nabídne astronautům lepší výkon a spojení
Autor: Stanislav Mihulka (04.11.2018)
Ruský Progres zkrátil cestu na ISS ze dnů na hodiny
Autor: Josef Pazdera (10.07.2018)
Na ISS se bude číst DNA
Autor: Dušan Majer (20.07.2016)
Lunární vesnička jako nástupce ISS
Autor: Tomáš Kohout (19.05.2016)
Diskuze:


