Zařízení experimentu ROMAP je primárně určeno k měření magnetického pole. Když v minulosti prolétávaly jiné sondy v blízkosti jader komet, snaha o změření magnetického pole byla nulová. Bylo zřejmé, že pokud jej komety mají, bude dosahovat minimálních hodnot. Až mise Rosetta mohla přinést přesnější odpovědi. Kdyby se podařilo hodnoty magnetického pole naměřit, šlo by o přelomovou skutečnost, která by zřejmě vedla ke změnám v našich současných teoriích.
| Umístění "experimentu" ROMAP na landeru Philae. Kredit: ESA |

Rosetta Lander Magnetometer and Plasma Detector
Hlavní senzory zařízení jsou umístěny na konci 60 cm výsuvného ramene (viz obrázek). Jeden z nich měří intenzitu magnetického pole, zatímco další množství ionizovaných plynů a elektronů v okolí jádra. Jejich úkolem bylo poskytnout odpovědi na tyto otázky:
- Mají kometární jádra nějaké zbytkové magnetické pole?
- Jakou roli sehrál magnetismus při vzniku a vývoji naší sluneční soustavy?
- Jak se mění interakce mezi kometou a slunečním větrem v průběhu přibližování?
Magnetometr je využíván běžně vědci jak na Zemi, tak při kosmických misích. Ale vytvořit co nejlehčí zařízení fungující v podmínkách extrémního chladu (-150°C a méně) a s minimálními nároky na spotřebu byla výzva. Proto bylo zvoleno řešení drobných senzorů na výsuvném rameni. Byl rovněž vyvinut elektronický systém, který ihned převádí naměřené veličiny do digitální podoby a umožňuje tak jejich rychlý zápis.
| Senzory ROMAP na konci výsuvného ramene. Kredit: Technische Universität Braunschweig Zdroj |

ROMAP jako pomocník při určení dráhy Philae
Změny intenzity magnetického pole mohou být však využity i v určování pohybu landeru. Elektronické obvody Philae i Rosetty totiž rovněž generují slabé magnetické pole. To způsobuje drobné odchylky v naměřených datech, které se při normálním provozu odečítají od hodnot přirozeného magnetického pole kometárního jádra a slunečního větru. Ale v průběhu přibližování Philae k povrchu 67P byly tyto odchylky naopak zaznamenávány a analyzovány, poskytovaly totiž důležité informace o tom, co se s Philae v té době dělo.
„Jakékoli pohyby modulu – byť drobné – se odrazí na měření senzorů jako jemná změna směrové orientace magnetického pole,“ vysvětluje jeden z vedoucích pracovníků týmu ROMAP, Hans-Ulrich Auster z německé Technické univerzity v Braunschweigu.
Vědecký personál se nyní snaží sestavit časovou osu přistání modulu 12. listopadu:
- Oddělení modulu Philae od mateřské sondy bylo potvrzeno postupným snižováním odchylek v magnetickém poli, způsobeným narůstající vzdáleností mezi sondou a modulem. V tu dobu byla rotační rychlost modulu přibližně jedna otáčka za 5 minut.
- Došlo k vysunutí přistávací trojnožky modulu, což se projevilo drobnou změnou rotační rychlosti na jednu otáčku každých cca 8,5 minuty.
- Rameno se senzory ROMAP se vysunulo směrem od modulu: odchylky v intenzitě magnetického pole ještě o něco poklesly v důsledku nárůstu vzdálenosti mezi senzory a samotným tělem modulu.
- V průběhu sedmihodinového sestupu byly všechny naměřené hodnoty nominální, v 15:34:04 kometárního času (ten se udává v GMT) zachytily senzory první kontakt s povrchem. Tento signál dorazil na Zemi po 28 minutách, tj. v 17:03 SEČ.
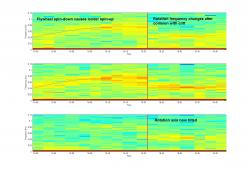
| Změny frekvence rotačního momentu modulu po drobné kolizi mezi prvním a druhým kontaktem. Modul zřejmě zavadil o okraj kráteru. Kredit: ESA/Rosetta/ROMAP/IGeP_TU/Braunscheig/Hungarian Academy of Sciences/Centre for Energy Research/ Space Research Institute Graz Zdroj |
- Po prvním odrazu se rotace modulu zvýšila. Došlo k deaktivaci elektroniky palubního gyroskopu. Ten se na na 40 minut zastavil, čímž předal svůj otáčivý model celému modulu. V té době se otáčel Philae rychlostí jedné otáčky za 13 sekund.
- V 16:20 GMT modul zavadil o dosud neznámým povrchový útvar, možná o okraj kráteru.
"Šlo o jiný druh kontaktu s povrchem než v prvním případě, neboť tentokrát senzory magnetického pole neindikovaly změnu pohybu ve vertikálním směru, jako tomu bylo v prvním a posledním případě", pokračuje Hans-Ulrich Auster. "Domníváme se, že Philae se v té době dostal do kontaktu s povrchem pouze jedním přistávacím ramenem, jakoby zavadil třeba o okraj kráteru, či nějakou skalnatou nerovnost. O něco později se modul doslova skutálel po povrchu - od té doby už neprobíhala rotace jen podél svislé osy. Naměřená data svěčí o chaotické rotaci v různých směrech. Krátkodobé změny magnetického pole byly velmi intenzivní".
- Z těchto důvodů se rychlost rotace podél hlavní osy (z) opět snížila. Dosahovala hodnot jedné otáčky za 24 sekund.
- V 17:25:26 GMT se modul dostal znovu do kontaktu s povrchem, nejdříve jen jedním přistávacím ramenem, poté i dalšími dvěma.
- V 17:31:17 GMT poté co se přesunul zřejmě o dalších pár metrů, zůstal modul v současné pozici. Všechna tři ramena byla v kontaktu s povrchem.
Jak jsme se mohli přesvědčit, dosednutí modulu byla řádně divoká záležitost. Jak jsme uvedli v jednom článku těsně před přistáním: tým letové kontroly v ESOC bude potřebovat i notnou dávku štěstí. Myslím, že tato věta se vyplnila víc než dost, a ať už si o celém manévru myslíme cokoli, bylo malým zázrakem, že po posledním dosednutí Philae fungoval bez větších problémů přibližně 64 hodin, než došlo k vybití primárních baterií.
V minulých dnech jsme vás už informovali o průběžných výsledcích analýz dat ze zařízení SD2, MUPUS a SESAME. Připomeňme si však, že rozbory nejsou ještě kompletní a může dojít k rozličným změnám v interpretaci dat. Ti co sledují situaci kolem landeru pravidelně, si asi všimli minimálně dvou odlišností v prezentaci událostí dosednutí modulu na povrch 67P, než jak tomu bylo v předchozích zprávách. I nadále vás budeme o všech novinkách a změnách informovat.
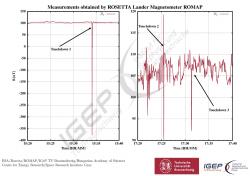
| Výsledky měření změn magnetického pole, jak jej obdržela sonda Rosetta. Časy jsou v GMT a jde o místní "kometární" (palubní) čas. Kredit: ESA/Rosetta/ROMAP/IGeP_TU Braunschweig/Hungarian Academy of Sciences Centre for Energy Research/Space Research Institute Graz Zdroj |
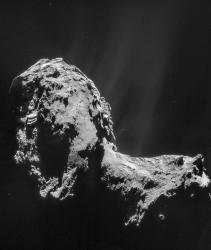
V klasické fotogalerii na závěr se podíváme na dva záznamy navigační kamery mateřské sondy. I zde už vidíme dramatické změny v množství sublimovaného materiálu v důsledku ubývající vzdálenosti od Slunce. V obou případech jde o složené mozaiky ze čtyř po sobě jdoucích snímků (celé jádro by se nevešlo do zorného pole kamery). Údaje o vzdálenosti od jádra a rozlišení uvádíme u každého snímku zvlášť, i když se o moc neliší. To co mají ale společného je druhá upravená verze snímku - jemně přeexponovaná a se zvýrazněným jasem, aby byly patrnější výrony plynu a prachu. Aktivita komety narůstá, a člověka až mrazí, když si představí, co nám bude sonda odesílat za snímky za několik měsíců...
První složený snímek pochází ze snímkování NavCam z 20.11. a vzdálenosti 30,8 km od centra komety. Rozlišení je 2,6 m/pixel, takže každý ze čtyř originálních snímků 1024 x 1024 zabírá napříč plochu přibližně 2,7 km. Výsledná mozaika je upravena a její zorné pole je o rozměrech přibližně 4,2 x 5 km.
| Montáž čtyř snímků z 20. listopadu Kredit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0 Zdroj | |
| Mozaika z 20. listopadu jemně přeexponovaná a se zvýšeným jasem Kredit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0 Zdroj |
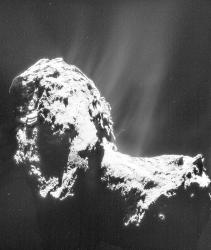
Druhá montáž pochazí ze snímkování 26. listopadu. Sonda se nacházela 30,1 km od centra komety. Rozlišení je 2,4 m/pixel, takže každý ze čtyř původních snímků 1024 x 1024 zachycuje plochu 2,5 km
| Montáž z 26.11. ze vzdálenosti 30,1 km od jádra Kredit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0 Zdroj | |
| Montáž z 26. listopadu jemně přeexponovaná a se zvýšeným jasem Kredit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0 Zdroj |

Zdroje:
http://blogs.esa.int/rosetta/2014/11/28/did-philae-graze-a-crater-rim-during-its-first-bounce/
http://blogs.esa.int/rosetta/2014/11/11/tracking-philaes-descent-with-magnetic-data/
http://www.open.ac.uk/science/research/rosetta/mission/philae-lander/romap
http://www.mps.mpg.de/2714359/ROMAP
Ken a Julča promluvily
Autor: Josef Pazdera (14.09.2016)
Rosetta zkoumá kometární koma
Autor: Dušan Majer (05.06.2015)
Mapa komety a věda z Rosetty
Autor: Dušan Majer (28.01.2015)
Hledání modulu Philae
Autor: Vladimír Pecha (22.11.2014)
Mise Rosetta týden poté
Autor: Vladimír Pecha (20.11.2014)
Diskuze:
Správná předpověď?
Martin Krupicka,2014-11-30 10:22:36
https://www.youtube.com/watch?v=AvkPFXdpOQQ&list=PLbyvawxScNbtAhH8vHAYl-pyEirPi-4Ad#t=80
Zatím to tedy vypadá, že vizualizace na propagačním videu byla asi nejpřesnější.
protiklady...
Juraj Chovan,2014-11-29 13:33:05
Údaje v tomto článku sú v silnom protiklade s doteraz prezentovaným scenárom pristátia. Doteraz sa hovorilo že medzi prvým a druhým kontaktom lander takmer "uletel" - vraj vyskočil až do výšky okolo kilometra nad povrch kométy.
V článku uvádzaná zmena rotácie (prezentovaná ako zachytenie o kráter) sa udiala 46min po prvom dotyku a 65min pred druhým dotykom, lander mal byť teda takmer na vrchole svojej balistickej dráhy.
Avšak kde by sa kilometer nad povrchom dvojkilometrovej kométy vzal kráter?
Takže:
a) Buďto sa lander po prvom kontakte odrazil úplne iným smerom ako si myslíme (mohlo sa stať ak miesto dotyku bolo výrazne šikmé), namiesto "nahor" letel viac-menej súbežne s povrchom (menšia vertikálna rýchlosť ale vyššia horizontálna), po 46min zavadil o voľačo na okraji "hlavy kačky" a po ďalších 65min pristál niekde na "krku kačky" a je teda úplne inde ako si myslíme.
b) V článku prezentované dáta sa udiali nie ako čiastočný kontakt s kométou ale vo voľnom priestore, zrejme ako dôsledok zapnutia/vypnutia gyroskopu.
Možnosť b) sa mi vidí reálnejšia...
Diskuze je otevřená pouze 7dní od zvěřejnění příspěvku nebo na povolení redakce


