
University of Pittsburgh
V pennsylvánské University of Pittsburgh je pracoviště s názvem Motorlab. Neinovují zde pohonné jednotky do automobilů, ale konstruují robotické ruce ovládané vůlí, tedy elektrickými impulzy konkrétních neuronů v primární motorické kůře. Ty aktivuje samo rozhodnutí udělat rukou určitý pohyb. Protože vědci napojují senzory přímo na mozková centra, výzkumu se nedobrovolně podrobily opičky - makaci.
Nejjednodušší robotickou ruku vědci předvedli již před pěti lety. K sedačce připoutaná opice si její pomocí jenom podávala pamlsky ke svým ústům. Zprávy o výsledcích tohoto výzkumu a vývoje ale obletěly svět před dvěma lety, kdy pittsburští vědci publikovali článek v prestižním Nature. Následující video (z roku 2008) je tou nejnázornější formou popisu:
Robotická ruka a na videu je připojená na 100 neuronů v motorické mozkové kůře makaka. Zesílené a počítačovým programem přeložené impulzy ovládají pohyb mechanické končetiny se 4mi stupni volnosti – sevření dvou „prstů“ a třídimenzionální pohyb v prostoru.
Za uplynulé dva roky americký tým pod vedením Andrewa Schwartze pokročil. Pohyblivost kloubů rozšířil a k původním čtyřem nezávislým pohybům přidal další tři:
To si samozřejmě vyžádalo i mnohem více vstupních „logických obvodů“ a tak čidla museli vědci napojit na více neuronů dvou motorických center v primární kůře – pro ovládání pohybu prstů a pro pohyby ramene. Když se opici podaří sevřít držák, trubkou umístěnou před tlamičkou dostane napít chutnou šťávu.
Jak se „cvičí“ opice i počítač?
Makaka se senzory napojenými na neurony v příslušných motorických centrech mozkové kůry vědci uvězní do nehybné polohy na sedačce. Pak před jeho zrakem pohybují robotickou rukou a učí ho, jaký pohyb mu podá pamlsek přímo do tlamy (v prvním případě), nebo mu, v případě druhém, přidělí hlt nápoje jako odměnu za sevření vždy jinde umístěného držáku. Protože souvislost mezi pohybem vlastní a robotické ruky je poměrně lehce pochopitelná, makak to po krátkém čase zvládne a pak zcela přirozeně "chce" udělat ten správný pohyb, za který bude odměněn i když sám fyzicky nemůže. Takto se časem naučil na pohyb myslet, přičemž jeho mozek vysílá signály pro pohyb jeho ruky. Na prvním videu je vidět, že se o příslušný pohyb snaží i jeho uvězněná paže, druhé video svědčí o tom, že se zcela naučil odděliť myšlenku od jejího samotného provedení.
Mozkem vysílané impulzy museli vědci nejdříve dešifrovat a pak přeložit pomocí programu počítače do signálů „srozumitelných“ motorkům robotické ruky.
Mozkem ovládané protézy
Lidem, kteří nešťastně o končetinu přišli, je zatím předčasné a rizikové zavádět senzory přímo do mozku, navíc, když dokážou mnohem vědoměji spolupracovat. Úspěšné byly pokusy, které pomocí neinvazivní techniky – snímáním elektrických impulzů z povrchu lebky – přinutily mechanickou dlaň se zavírat a otevírat. Zajímavé a nadějné jsou ale experimenty s těmi, jež funkční náhradní končetinu potřebují. V článku Robotický exoskelet nahrazuje svaly jsme již představili výsledky vědců z Michiganské university, kteří našli způsob, jak pomocí vnějšího mechanizmu a nervových impulzů přicházejících z mozku do postižené končetiny přinutit k chůzi paralyzovanou nohu.
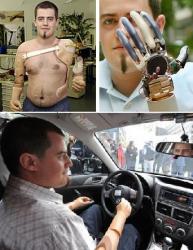
Na světové prvenství ve využití mozkem ovládaných protéz si ale sáhli rakouští vědci, kteří v roce 2006, při šestihodinové operaci připojili k tělu mladého švýcarského technika Christiana Kandlbauera dvě elektronické protézy, vyvinuté vídeňskou firmou Otto Bock Healthcare Products GmbH. Nešťastný mladík po zásahu vysokým napětím přišel o část jedné a celou druhou ruku. Vědci mu levou elektronickou protézu napojili na nervy vedoucí do prsních svalů, protože z vlastní končetiny Christianovi nezůstala ani část paže. Pravou pak připojili na nervy ve svalech ve zbytku ramene. Po dlouhém tréninku se mladý muž naučil své nové ruce ovládat a po několika vylepšeních se dnes dokáže bezpečně napít z poháru a ovládat jen mírně upravené auto.
27letý Ital Pierpaolo Petruzziello podstoupil podobnou operaci. Souhlasil, aby mu na nervy vedoucí do části paže, která mu zůstala po amputaci, pokusně zavedli elektronický systém vyvinutý německým IBMT Institute Fraunhofer Gesellschaft. Čidla snímaly impulzy přicházející do svalů z mozku a přes zesilovač transportovaly do počítače ovládajícího podle těchto pokynů pohyby robotické ruky. V tomto případě šlo ale jenom o pokus, robotická ruka nebyla k tělu připevněna. I když se zdá, že vůči rakouskému úspěchu je to krok zpět, vědci tvrdí, že v tomto případě jde o komplexnější pohyby, kdy se Pierpaolo naučil pomocí myšlenek ovládat každý prst nezávisle. I když mu to kvalitu života zatím pravděpodobně (kromě zájmů vědců a novinářů) nezlepšilo, považuje navzdory všem potížím experiment za velmi zajímavý.
Zdroje: Motorlab, Physorg, You Tube, Daily Mail
Diskuze:
Dobrá otázka!
Dagmar Gregorova,2010-06-07 20:57:21
V článku z r. 2008 sa uvádza, že vedci makakom implantovali "vnútrokôrové systémy mikroelektród". Samotný opis však chýba, ale snáď ide o presne toto:
http://nrg.mbi.ufl.edu/publications/conference/conference%2051.pdf
V supplementary info (http://www.nature.com/nature/journal/v453/n7198/extref/nature06996-s1.pdf):
Neurophysiological Recordings. Intracortical microelectrodes were implanted in the proximal arm region of the primary motor cortex. Spike signals were acquired using a 96-channel Plexon MAP system (Plexon Inc., Dallas, TX, USA). Monkey P had 4 microwire arrays in each hemisphere. The arrays consisted of 16 teflon-coated tungsten wires, each with a diameter of 50μm, arranged in a 2×8 grid with 300μm spacing. All 64 channels from the right hemisphere and 32 of the 64 from the left were connected for recording at any one time. Monkey A was implanted with a Utah array (Cyberkinetics, Inc., Foxborough, MA, U.S.A.) in the right hemisphere, consisting of a 10 ×10 grid of electrodes with 400μm spacing and a shank length of 1.5mm. Out of the 100 electrodes on the Utah array, 96 were wired for recording and the remaining 4 were unconnected.
The number of units typically isolated each day was 20-50 for monkey P (mostly from the right hemisphere, the left hemisphere typically yielded only a few or no channels with spiking activity that could be isolated). Of the 20-50 isolated units for monkey P, 10-30 were typically used for control. For monkey A, 150-180 units were isolated from the right hemisphere with 60-120 used for control. Spikes were sorted using the box-sorting and PCA methods in Plexon’s SortClient software (a part of their Rasputin package). Most of the sorted units were multi-unit clusters and some were single units.
Diskuze je otevřená pouze 7dní od zvěřejnění příspěvku nebo na povolení redakce


