Kiloboty jsou levné robotické systémy pro testy chování početnějších skupin spolupracujících robotů. Technologii umožňující snadné ověřování algoritmů koordinované činnosti stovek nebo dokonce tisíců malých robotů si nechali oxfordští technici z Harvard University patentovat. První hmatatelnou aplikací jsou asi jako palec široké válečky šmejdící na tenkých nožkách, připomínající umělý hmyz. Počítačoví fandové z katedry robotiky jich vyrobili celé hejno, aby jejich chování mohli zkoumat. Jakmile je vědci oživí, stávají se z nich autonomní jednotky, do jejichž rozhodování se dál nemontují.

Licenci na výrobu komunikujících a samoorganizujících se systémů předvádějících něco, co ze všeho nejvíc připomíná sobotní hemžení na zamrzlém vesnickém rybníčku, získal švýcarský výrobce dodávající zařízení pro výzkumné účely, K-Team Corporation. Ten kiloboty zařadil do nabídky internetových ochodů. Pro veřejnost se rázem staly hitem předvánočního davového šílenství. Již na vánoce si kromě výzkumníků bude moci pohrát s vlastním hejnem vrnících bobků i celá řada nadšenců pro robotiku. Cíl výzkumníků je ale dosáhnout praktických aplikací multirobotických systémů. Zatím jim k tomu sofistikované algoritmy, které by umožňovaly koordinovat činnost tisíců samostatně se rozhodujících prvků ale chybí. Jejich kiloboty ještě nezvládají ani to, co obyčejní mravenci, když plení své okolí, aby se nasytili nebo posbírali co nejvíce zdrojů pro své houbové plantáže.

Podle Radhiky Nagpalové, vedoucí týmu, by jejich systémy měly brzo asistovat při hledání osob či věcí v troskách po živelných pohromách. Při monitorování rizikových míst, odstraňování překážek a nečistot. A pokud vše ve svém vyjádření pro tisk myslela vážně, tak i při opylování rostlin.
Jeden se ale nemůže zbavit dojmu, zda to, co k vytváření kýžených algoritmů a jejich ověřování potřebuje, jsou skutečně ty předváděné blikající kiloboty. Jestli spíše nejsou divadýlkem pro mecenáše a snahou o komerční úspěch. Pokud vědcům jejich tah s patentovanou "hračkou" vyjde, budou všichni „za vodou“ a do důchodu si budou moci zkoumat, co budou chtít, aniž by každoročně museli psát ponížené supliky s žádostí o nové a nové granty.
Prameny: Harvard University, K-Team Corporation
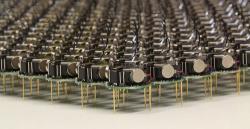
Kiloboty mohou zatáčet vlevo i vpravo, nebo „jet“ rovně. Na příkaz signalizují stav nabití svých baterií. Když čekají na nový příkaz blikají. Po dobu nahrávání nového programu jejich ledky svítí trvale. Nové chování lze všem kilobotům vnutit najednou během 35 sekund. Zahájení akce signalizují rudě.
Ukázka schopností: komunikace, určování vzdálenosti, automní zpracování dat.
29 kilobotů při „hledání potravy“ (snahou je udržovat rozestupy) a v programu „pojďme všichni sborem“.
Švábi kyborgové dostanou potápěčské obleky pro speciální operace
Autor: Stanislav Mihulka (02.07.2026)
První robot zdolal velehoru Chimborazo
Autor: Jaroslav Petr (13.06.2026)
Extrémně symetrický a šikovný robot Argus má 20 končetin s kamerami
Autor: Stanislav Mihulka (31.05.2026)
Unitree předvedli funkčního mecha bota GD 01 s lidským operátorem
Autor: Stanislav Mihulka (14.05.2026)
Čtyřkolový robot Ripsaw M1 postupuje před námořní pěchotou
Autor: Stanislav Mihulka (03.05.2026)
Diskuze:
Hardvérové skutočné RNG jestvujú
Rudolf Dovičín,2011-11-27 22:42:24
a niektoré sú aj dosť rýchle:
http://en.WikiPedia.org/wiki/Hardware_random_number_generator
Ladislav Lang,2011-11-23 17:53:04
No tak urcie je nevyrobili kvůli tomu, aby je mohli zkoumat:-) je to spis takové hraní - oproti simulaci v počítači to nemá ani tu nejmenší výhodu...
Martin Plesinger,2011-11-24 21:15:36
Rekl bych, ze je to rozhodne jednodussi a levnejsi nez to simulovat na pocitaci. Realne muze byt vyrobni cena robota v radu maximalne korun a narozdil od pocitace neni potreba osetrovat asynchronni chovani robotu pri startu.
Je to trochu jinak...
Vojtěch Kocián,2011-11-24 21:30:19
Na jednom počítači je možné simulovat tisíce takových robotů a ještě rychleji, než v reálném čase. V tomto ohledu má pan Lang pravdu.
Reální roboti mají ale jednu výhodu a tou je právě ta jejich realističnost. Různé chyby, nepřesnosti, nerovnosti podložky, výpadky a podobně se na počítači simulují mnohem hůř a vlastně se jen modelují podle nějakých vzorců. Realitu to nenahradí. Leda by se zvýšil výpočetní výkon na jednoho simulovaného robota v rámci zvýšení realističnosti, ale to už se zase můžeme dostat do stavu jeden simulovaný robot na jednom počítači.
Zkrátka a dobře, na každou aplikaci je lepší něco jiného. Někdy je výhodnější simulovat, jindy zas vyrobit malé roboty.
Martin Plesinger,2011-11-25 10:55:35
Vsak o tom jsem mluvil. Nikde nerikam, ze to simulovat nejde. V jeden okamzik se ale nezbytne dostaneme do situace, kdy vyzadujeme natolik realistickou simlulaci, ze je levnejsi robota vyrobit. Tomu se tezko vyhneme.
Martin Plesinger,2011-11-25 10:55:44
Vsak o tom jsem mluvil. Nikde nerikam, ze to simulovat nejde. V jeden okamzik se ale nezbytne dostaneme do situace, kdy vyzadujeme natolik realistickou simlulaci, ze je levnejsi robota vyrobit. Tomu se tezko vyhneme.
Ladislav Lang,2011-11-25 13:18:36
Pokud tvrdí, ze chtějí simulovat chování, tak k tomu ty robutky vůbec nepotřebuji! Na počítači udělají stěnou simulaci asi miliardkrat rychleji.
Ano roboti se chovají o zdibecek jinak než v počítači, ale jaky má ten rozdíl smysl? Jakým způsobem může pomoci to, ze je simulace ovlivněna nedokonalosti nejakych pidirobutku? Jinými slovy, oni zkoumají chování, které naprogramovali zatíženě chybou "reality", kterou vytvořili.
Nezpochybnuji to, ze jde o projekt zábavný, jistě mediálně zajimavy, ale rozhodne není jeho cílem zkoumání chovani
Martin Plesinger,2011-11-26 17:00:49
Nejsem odbornik na robotiku, ale rekl bych ze ten vliv muze byt znacny. Zejmena pro vylouceni ruznych sysmetrickych vzoru chovani, kterych se v te pocitacove simulaci tezko vyhneme. Bezne generatory pseudonahodnych generuji cisla (zejmena kdyz uvazujete velke serie cisel == velke mnozstvi robotu a velke mnozstvi kroku simulace) pomerne dost pravidelne. Tim si nepomuzete. No nic, to byla jen myslenka ;)
Proc by tim nemeli skoumat chovani, tomu nerozumim. Neco naprogramuju a sleduju chovani toho programu, nebo ne?
Diskuze je otevřená pouze 7dní od zvěřejnění příspěvku nebo na povolení redakce


