Průzkum podmořských hloubek
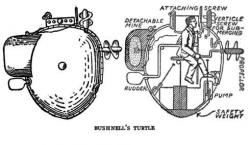
Jeden z prvních prototypů ponorky byla Želva (Turtle) Američana Davida Bushnella, který ji v roce 1775 postavil s myšlenkou, že bude nenápadně připevňovat výbušniny na spodní části trupů nepřátelských britských lodí v boji amerických kolonií za svoji nezávislost.
Želva žel své poslání plnila jen napůl – sice plavala, nikdy však žádnou loď nepotopila. Z pohledu současnosti měla prapodivný tvar – podobala se kříženci dřevěného sudu s koulí nebo dvěma spojeným želvím krunýřům. Jediný člen posádky, který se do ní vešel, v sedě ručně točil vrtulí a ovládal kormidlo.

Koule, i když není zrovna tím nejvíce aero-, vlastně hydrodynamickým tvarem, se díky symetrickému rozložení tlaku kapaliny po jejím povrchu uplatnila pro hlubokomořské průzkumné roboty, jakými je například série ODINů – všemi směry autonomně manévrujících samonaváděcích miniponorek se sonary, měřiči tlaku a dalšími přístroji z Laboratoře pro autonomní systémy Havajské university. Prý vydrží sestup až do hloubky 6 km.
Větrem kutálené sondy
I souš lze za jistých okolností zkoumat pomocí koule, a to právě v oblastech pro život nehostinných. Ne tak sofistikovaný, jako je podmořský ODIN, ale i tak zajímavý i trochu úsměvný projekt představuje následující video. Průzkumnou dvoumetrovou nafukovací kouli z Laboratoře pro tryskové pohony NASA po osm dnů hnal alternativní zdroj energie - vítr - po povrchu ledové pláně až do vzdálenosti asi 70 km od místa startu - antarktické Amundsenovy–Scottovy polární stanice. Údaje o své poloze a okolních povětrnostních podmínkách zasílala přes družici Iridium.
A podobné „kulaté“ projekty pro výzkum Marsu kalkulující s jeho menší gravitací, poměrně rovným terénem a vanoucími větry:
Kuličky v potrubí
Chytří výzkumníci rychle reagují na aktuální společenskou poptávku vyvolanou nějakými obavami. Nejednou k nim sami přispějí, zvyšujíce tím důležitost své práce. Naštěstí i taková motivace může vést k zajímavým výsledkům. Po velkém zemětřesení v Japonsku se vzedmula celosvětová cunami nedůvěry v bezpečnost jaderných elektráren, které teď prověřují téměř všude, nejen v Německu, jenž je i tak hodlá postupně odepsat. V USA pracuje 104 reaktorů a jejich všechna zařízení nyní také procházejí testy. Včetně podzemního potrubí odvádějícího vodu. Jeho stav se monitoruje dost těžko. Ultrazvukem a odporovými elektrickými metodami lze z povrchu odhalit až větší stupeň koroze nebo případné netěsnosti.

Profesor Harry Asada z Katedry strojírenství Massatchusettského technického ústavu (MIT) se svými kolegy vyvíjí pro monitoring vnitřních stěn potrubí malou ponorku – robota ve tvaru kuličky velikosti vejce. Zatím se zaměřují na jaderné reaktory a jejich cílem je proto odolnost zařízení vůči radioaktivitě prostředí. Letos v květnu Asada o projektu referoval na mezinárodní konferenci IEEE o robotizaci a automatizaci, která se konala v Číně.
Aby robotická kulička při plnění svého úkolu lehce proplouvala potrubím, z jejího kovového povrchu jen nepatrně vyčnívají do tří stran směřující otvory speciálních ventilů a objektiv kamery.

Ta podle původních plánů měla videozáznam vnitřku potrubí ukládat do paměti, takže by byl dostupný až po skončení monitoringu. Asadovi studenti však vyvíjejí bezdrátový komunikační podvodní systém využívající laser pro přenos snímků v reálném čase na vzdálenost až 100 metrů. A také objektiv „oživují“, aby se pohyboval do stran jako oční bulva. Proto do nitra kuličky umístili mechanismus využívající princip dvouosého Kardanova závěsu, který natáčí kameru i když se robot nehýbe.
Ian Rust, jeden z Asadových doktorandů tento koncept přirovnal ke kouli pro venčení malého domácího hlodavčího mazlíčka. Je trojrozměrnou, po rovném povrchu se volně pohybující variantou tréningového kolotoče (viz obr vlevo).
Tím nejzajímavějších na robotické kuličce bude asi manévrovací systém. Žel z dostupných informací jeho princip není zcela jasný. Lze však vydedukovat, že pohyb koule je ovládán systémem asi dvou trojic speciálních ventilů, které jsou pod vrchním pláštěm propojeny do písmene Y. Otevírají a zavírají se změnou tlaku vody. Její proudění přes kombinaci těch právě otevřených ventilů určuje směr pohybu a natáčení celé kuličky. Protože voda teče přes otvory směrované do stran a ne kolmo, vzniká v těch místech podtlak, který ji k proudu přitahuje, jako když nafouklý balónek přiblížíte k proudu vody z kohoutku - jev známý jako Coandův efekt (jednoduché vysvětlení zde a zde). Vhánění vody do systému ventilů pravděpodobně zajišťují malé pumpy s nasáváním zvenku. Jediné však, co v mediální zprávě z MITu prozrazuje jejich existenci je zmínka v popisku pod náčrtkem celého zařízení. Mohlo by jít o obdélníkovou krabičku znázorněnou na jednom ze dvou(?) tříventilových Y-systémů. Zakreslený kruhový pás bude pravděpodobně válečkové ložisko dvouosého otočného systému ovládajícího vlastní pohyb kamery. To, co v informacích nejvíc chybí, je vysvětlení, jak se malá ponorka „rozhoduje“ kam objektiv kamery namíří a hlavně jak je systém ventilů ovládán, tedy kterým směrem bude plavat. Zpráva z MITu mluví o autonomním pohonu a proti dálkovému ovládání svědčí i použití v kovovém potrubí, jenž hned tak nějaké elektromagnetické signály nepropustí. A když se nasnímaný záznam (zatím) vyhodnocuje až po skončení akce, není ani na základě čeho se v daném okamžiku zvenčí rozhodnout o konkrétním manévru. Takže se zdá předpokládat, že kulička je hnána kupředu hlavně proudem vody uvnitř potrubí a její vlastní pohyb je pravděpodobně autonomně řízen podle velmi jednoduchého algoritmu – například rotace okolo osy s kamerou natočenou kolmo na aktuální směr posunu (požádáme profesora Asadu o další informace).
Jestli malá kulatá ponorka dokáže autonomně manévrovat, jak její konstruktéři uvádějí, pak není zatěžko si představit celou řadu jejích různých zajímavých aplikací. Současný stupeň miniaturizace umožňuje do malého objemu vtěsnat i další čidla než jen optiku kamery.
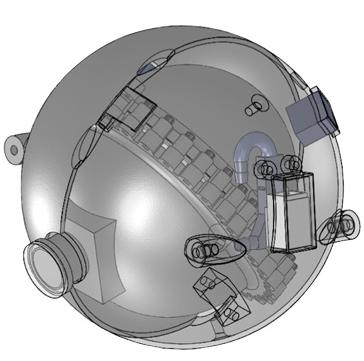
Robotická kulička vybavena kamerou se může pohybovat uvnitř podzemního potrubí jaderných reaktorů pomocí vnitřního systému ventilů a pump. Kredit: Harry Asada/d"Arbeloff Laboratory
Z antických mýtů přijel čínský robokentaur
Autor: Stanislav Mihulka (25.07.2026)
Švábi kyborgové dostanou potápěčské obleky pro speciální operace
Autor: Stanislav Mihulka (02.07.2026)
První robot zdolal velehoru Chimborazo
Autor: Jaroslav Petr (13.06.2026)
Extrémně symetrický a šikovný robot Argus má 20 končetin s kamerami
Autor: Stanislav Mihulka (31.05.2026)
Unitree předvedli funkčního mecha bota GD 01 s lidským operátorem
Autor: Stanislav Mihulka (14.05.2026)
Diskuze:


